A Mathematical Introduction to Robotic Manipulation





A Mathematical Introduction to Robotic Manipulation
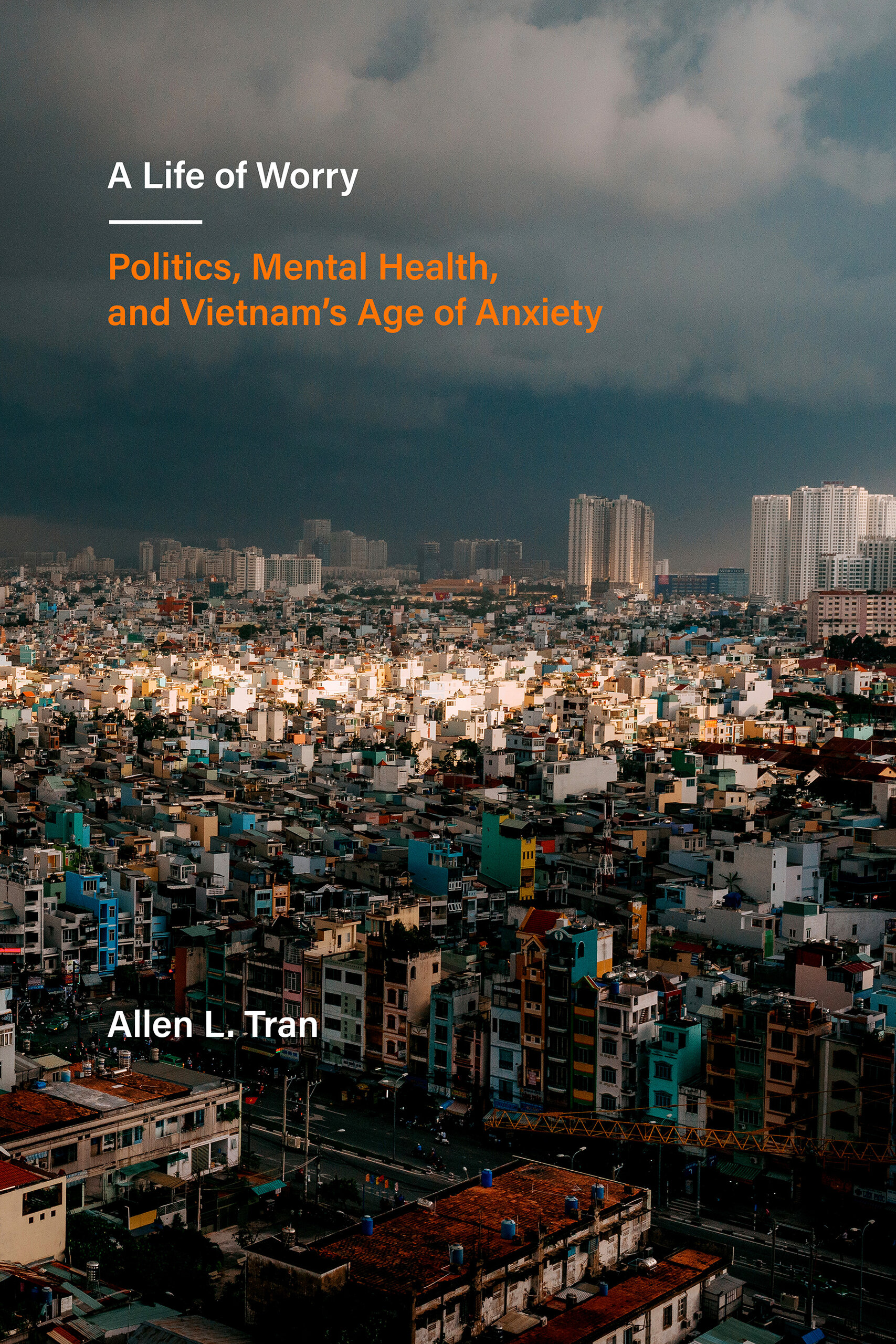
A Mathematical Introduction to Robotic Manipulation (Dẫn luận Toán học về Điều khiển Robot) trình bày một hệ thống công thức toán học về động học, động lực học và điều khiển các cánh tay robot. Cuốn sách sử dụng một tập hợp các công cụ toán học tinh gọn, nhấn mạnh vào hình học của chuyển động robot, cho phép phân tích một lớp lớn các bài toán điều khiển robot trong một khung lý thuyết thống nhất.
Nền tảng của cuốn sách là việc xây dựng động học robot dựa trên công thức tích các ma trận mũ (product of exponentials formula). Các tác giả đi sâu nghiên cứu động học của các cánh tay robot chuỗi hở và bàn tay robot nhiều ngón; trình bày các phân tích về động lực học và điều khiển hệ thống robot; thảo luận về việc xác định và điều khiển nội lực cũng như các chuyển động nội tại; đồng thời giải quyết các hệ quả từ bản chất phi môn (nonholonomic) của tiếp xúc lăn.
Với lượng thông tin phong phú, nhiều ví dụ minh họa và bài tập thực hành, cuốn sách này là nguồn tài liệu tham khảo giá trị cho các nhà nghiên cứu robot, đồng thời là giáo trình hữu ích cho sinh viên trong các khóa học robot nâng cao.
Xem thêm
Please wait while flipbook is loading. For more related info, FAQs and issues please refer to DearFlip WordPress Flipbook Plugin Help documentation.
Tài liệu khác cùng chủ đề
Electromagnetic Fields in Biological Systems
Methodological Approaches for Workplace Research and Management
Sport and Development in Emerging Nations
Hybrid Labour: Measuring, Classifying, and Representing Workers at the Boundaries of Employment and Self-employment

Routledge Handbook of High-Performance Workplaces
Place Branding and Marketing from a Policy Perspective: Building Effective Strategies for Places

Realising the Value of Culture: The Value-Based Approach
Governance Ethics in Healthcare Organizations
Manufacturing Competitiveness in Asia: How Internationally Competitive National Firms and Industries Developed in East Asia
Advancing Responsible AI in Public Sector Application
Basic Engineering Science — A Systems, Accounting, and Modeling Approach

Mobile Ad Hoc Networks: Current Status and Future Trends
Wi-Fi Enabled Healthcare
Ligustrum sinense Lour.: Essential Oil Compositions, Biological Activities, and In Silico Studies – A First Record
Optimized oxidative-alkaline treatment of AP1 ramie fibers for enhanced cellulose purity and tensile strength
Identification and Integrative Discovery of Anti-Inflammatory Compounds Isolated from Eclipta prostrata (L.) L. by Network Pharmacology, Molecular Docking, and In Vitro Evaluation
Searching for potential xanthine oxidase inhibitors from Vietnamese herb plants via computational studies
Chemical constituents from symplocos sumuntia and their anti-inflammatory effect
Anti-inflammatory Constituents from Artemisia iwayomogi Kitamura: A Bioassay-guided Fractionation Study
In vitro and in silico evaluation of anti-inflammatory triterpene saponins from Elsholtzia penduliflora W.W. Smith (Lamiaceae).

In vitro and in silico Analysis of PTP1B and α-Glucosidase Inhibitory Activities of Isoflavonoids Isolated from Belamcanda chinensis Roots
Characterization of 210Po activity and trace heavy metals in aerosols from traffic-dominated areas in urban, Hanoi, Vietnam: implications for air pollution sources and human health risks

Vietnamese researchers’ knowledge, attitudes, and practices regarding open access publishing: a cross-sectional study

Real-Time Systems Development with RTEMS and Multicore Processors
AI Knowledge Transfer from the University to Society: Applications in High-Impact Sectors
Systemic Service Design

Manifesto of the New Economy: Institutions and Business Models of the Digital Society
Intelligent Sensor Networks: The Integration of Sensor Networks, Signal Processing and Machine Learning
Window Functions and Their Applications in Signal Processing
Compact Models for Integrated Circuit Design: Conventional Transistors and Beyond
The financial sustainability of Vietnamese higher education institutions: unveiling the hidden factors
Critical Data Literacy: Strategies to Effectively Interpret and Evaluate Data Visualizations
Advanced Research Skills: Conducting Literature and Systematic Reviews (3rd Edition)
Beyond Dichotomy: Synergizing Writing Center and Classroom Pedagogies
Bad Ideas About Writing

Informed Arguments: A Guide to Writing and Research (4th Edition)
A Life of Worry: Politics, Mental Health, and Vietnam’s Age of Anxiety
Managing Generation Z: Motivation, Engagement and Loyalty
Digital Internationalisation of Firms: Strategies, Challenges and Legal Aspects

Higher Education Institutions and Digital Transformation: Building University-Enterprise Collaborative Relationships
Redefining Management: The Manager/Leader–Relevant Stakeholder Paradigm

Environmental, Social, and Governance Ratings: Risks, Regulations, and Market Dynamics
Digital Transformation in Educational Organizations: Leadership, Innovation and Industry 4.0

Library and Information Sciences: Trends and Research
A History of Self-Harm in Britain: A Genealogy of Cutting and Overdosing

Innovative Medicine: Basic Research and Development
Environmental Leadership Capacity Building in Higher Education
Safer Healthcare: Strategies for the Real World
Manifesto of the New Economy: Institutions and Business Models of the Digital Society

Quality Assurance in Distance Higher Education: A Bibliometric Study of Scopus-Indexed Publications Between 1993 and 2024
Exploring the Landscape of Role-Playing Game Research Through Bibliometric Analysis From 1986 to 2023 Using Scopus Database
Online teaching success in higher education: insights from bibliometrics and content analysis
Trends and Patterns of Research on Transnational Education: A Bibliometric Analysis with Scopus Data, 1972–2023
Learning at a distance in non-western context: How distant students perceive quality of higher education in Vietnam
Pile humor and distress: can we detect what doctoral students experience through memes they laugh at?

How ChatGPT undermines my research productivity
A literature review on green brand equity and future research directions
Machine learning-based assessment of flood susceptibility in the Eastern Mediterranean: a case study of Baniyas River basin
Assessing the concordance between meteorological and agricultural drought indices in arid and semi-arid regions

Spatio-temporal dynamics of vegetation and water bodies in the Lake Urmia Basin (1984–2022): an analysis using MODIS and Landsat data with new perspective

Distribution and risk assessments of 210Po in the body organs of common carp (Cyprinus carpio) and Barbel Chub (Squaliobarbus curriculus) within Red River, Vietnam
Taoism and its imprints in Vietnam

ent-Kaurane derivatives from Smallanthus sonchifolius
大学教育数字化转型与国际合作研究以成都大学为例的机遇与未来发展方向
New sesquiterpene derivatives from stems and leaves of Smallanthus sonchifolius
Assessment of Knowledge and Attitudes toward Medical Waste Segregation among Nursing Students: A Case Study at University in Vietnam

Effect of Fe3O4 Nanoparticles on Lovastatin Drug Release from Chitosan Films
Effect of solvent on properties of ZIF-8 and epoxy coating performance

Eriodictyol 5-O-methyl ether inhibits prostate cancer progression through targeting STAT3 signaling and inducing apoptosis and paraptosis
Piper hainanense Hemsl. and P. thomsonii (C.DC.) Hook.f.: Essential Oil compositions, Antimicrobial and Mosquito Larvicidal Activities
Essential oils from the leaves of Mitrephora calcarea Diels ex Weeras. & R.M.K.Saunders and M. maingayi Hook.f. & Thomson: Chemical analysis, biological activity, and molecular docking

Essential Oils of The Leaves of Syzygium hemilamprum (F. Muell.) Craven & Biffin.: Chemical Analysis, Antimicrobial, Mosquito Larvicidal, Molecular Docking, and ADMET Studies

Porous activated carbon spheres derived from resorcinol-formaldehyde resin with high performance for methylene blue removal

Chemical composition and antimicrobial activity of the leaf essential oil of Beilschmiedia danhkyii
Icariside II: natural occurrence, biotransformation, pharmacological activity, synthetic modification, pharmacokinetics, and bioavailability
Antiradical Potency of Diphlorethol: DFT (Density Functional Theory), Molecular Docking, and ADMET Profile

Searching for potential inhibitors of soluble epoxide hydrolase from xanthone derivatives: an in silico studies
越南汉语学习者汉越词直译偏误分析 ——以越南成都大学旅游外语系汉语专业生为例

Modelling and Analysis of Magnetic Field Distribution Generated by a Magnetised Paraboloid
A bibliographic analysis of university autonomy and accountability in Southeast Asia 1996 to 2023

Enhancement of wheat straw pellet quality for bioenergy through additive blending

Novel deep hybrid model for electricity price prediction based on dual decomposition
Satellite-based data for agricultural index insurance: a systematic quantitative literature review
Hybrid CNN-GRU model for hourly flood forecasting index: case studies from the Fiji islands
Explainable deeply-fused nets electricity demand prediction model: Factoring climate predictors for accuracy and deeper insights with probabilistic confidence interval and point-based forecasts

Formalization, productivity, and hidden costs: Evidence from Vietnam
Bảng kiểm đạo đức dành cho tác giả [Hướng dẫn của EASE]

Law and Ecology: New Environmental Foundations
Teacher Thinking & Professional Action
Human Rights in Business
High Temperature Electronics Design for Aero Engine Controls and Health Monitoring
Lý luận về bạo lực của Ph.Ăngghen với nhiệm vụ phát triển kinh tế – xã hội, tăng cường quốc phòng, an ninh ở Việt Nam hiện nay
Kinh nghiệm của một số quốc gia trong phát triển kinh tế sáng tạo và những gợi ý cho Việt Nam
Từ tư tưởng cơ bản của V.I.Lênin trong chính sách kinh tế mới đến nhiệm vụ xây dựng, phát triển nền kinh tế thị trường định hướng xã hội chủ nghĩa ở Việt Nam
Về phát triển kinh tế đêm tại Việt Nam hiện nay
Cải cách công vụ, công chức đáp ứng yêu cầu, nhiệm vụ cách mạng trong giai đoạn hiện nay ở Việt Nam
Phát triển nguồn nhân lực số đáp ứng yêu cầu phát triển kinh tế số: Thực trạng và giải pháp
Mô hình khai thác, sử dụng hè phố để phát triển du lịch, kinh tế đô thị bền vững tại Thủ đô Hà Nội
Xây dựng trường học đạt chuẩn quốc gia giai đoạn 2025-2030 tại tỉnh Vĩnh Phúc

Thực trạng tích hợp giáo dục vì sự phát triển bền vững trong dạy học “Sinh thái học và môi trường” (Sinh học 12): Nghiên cứu tại một số trường trung học phổ thông ở Hà Nội và thành phố Hồ Chí Minh

The Emerald Handbook of Research Management and Administration Around the World

Viết bài nghiên cứu: Lời khuyên từ Ban biên tập EASE

Khuyến nghị về Việc Sử dụng Trí tuệ Nhân tạo trong Truyền thông Học thuật
A pragmatic guide to systemd for Linux sysadmins

Social Cost Benefit Analysis and Economic Evaluation
Artificial Intelligence

UQ Bachelor of Pharmacy (Hons) Placement Handbook

A Portable Workbook for Data Analysis: R for the Social Sciences

Technical Writing

Conventions 101: A Functional Approach to Teaching (and Assessing!) Grammar and Punctuation
Airbnb Before, During and After COVID-19

Introduction to Finding Information

Using Computers in Healthcare

Innovative Business Mindset

Health Alterations

Nursing Advanced Skills

Open RN | Medical Terminology – 2e

Nursing: Mental Health and Community Concepts – 2e

Respiratory Therapy
Nursing Management and Professional Concepts 2e

Introduction to Autonomous Robots
Making Games with Python & Pygame

Foundations of Biomedical Science: Quantitative Literacy Theory and Problems

Semiconductor Devices: Theory and Application

Strength of Materials Supplement for Power Engineering
MIPS Assembly Language Programming using QtSpim

Community interventions in obesity-related chronic diseases

Clinical Veterinary Diagnostic Laboratory

Veterinary Epidemiology: Principles and Methods

Blueprints: Creating, Describing, and Implementing Designs for Larger-scale Software Projects – version 2.5

Project Management for a Changing Climate

Embedded Controllers Using C and Arduino / 2E
Digital Foundations: Introduction to Media Design with Adobe Creative Cloud
Deleting Dystopia: Re-Asserting Human Priorities in the Age of Surveillance Capitalism
An Open Approach to Scholarly Reading and Knowledge Management

Elementary Chinese I
Elementary Chinese II

Financial Management for Small Businesses, 2nd OER Edition
CLUE: Chemistry, Life, the Universe and Everything

Criminal Procedure: Undergraduate Edition
Reframing Digital Humanities: Conversations with Digital Humanists
Making Sense of Digital Humanities

Trail Building Law and Policy
Introduction to Human Resource Management
Stand up, Speak out:The Practice and Ethics of Public Speaking
Survey of Astronomy

Macro Practice for Community and Organizational Change
Professional Writing and Communications for Business
Student Success Through Collaboration: MTSS, RtI, and Special Education in Schools
Nurturing Potential: An Equity-Minded Approach to Functional Behavioral Assessment
Information Literacy: A Practical Guide
Basic Khmer

Foundations of Neuroscience
Cooperative Organic Chemistry Student Laboratory Manual
Microbiology for Allied Health Students
Anatomy and Physiology I Lab Manual

Open Technical Communication
World History: Cultures, States, and Societies to 1500
Film Appreciation (2024 Edition)

Legal Writing Manual (4th edition)

Introduction to Human Geography
Compact Anthology of World Literature

British Literature I Anthology

Intermediate Programming

Quantitative Skills and Reasoning
Information Security
Becoming America: An Exploration of American Literature from Precolonial to Post-Revolution

Research Methods for the Behavioral Sciences
Research as Inquiry A Discipline Specific Approach to Information Literacy
Steps to Success: A Guide to Excelling in College and Beyond
Introduction to Networks

Engineering Design with SolidWorks 2024
Introduction to Engineering
First-Year Writing Toolkit: A Guide to Key Skills and Essential Steps

Nationalism and the Transformation of the State Border Change and Political Violence in the Modern World
Self-directed multimodal learning in higher education
Principles of Natural Language Processing
Cyborgs and Centaurs: Academic Writing in the Age of Generative Artificial Intelligence
Artificial Intelligence and Librarianship
The Shallow and the Deep: A biased introduction to neural networks and old school machine learning
A Brief Introduction to Engineering Computation with MATLAB

Symbolic Logic
The Information Literacy User’s Guide: An Open, Online Textbook
Interdisciplinary Perspectives in Lifetime Wellness
General Psychology: An Introduction

Exploring Public Speaking

Social Science Research: Principles, Methods, and Practices
Show Me Criminal Procedure

Copyright Law: An Open Source Casebook
Introduction to Human Osteology

Principles of Nutrition Textbook, Third Edition

Concepts of Fitness and Wellness, 3rd Edition
Prose Fiction: An Introduction to the Semiotics of Narrative

Public Policy

Principles of Leadership

Overview of Healthcare Compliance
The Fundamentals of Healthcare Administration: Navigating Challenges and Coordinating Care

Best Practices in Online Teaching
Educational Learning Theories: 2nd Edition

Computer Organization
Principles of Managerial Accounting

Principles of Financial Accounting

Microeconomics for Business

Management Accounting Concepts and Techniques
Good Corporation, Bad Corporation: Corporate Social Responsibility in the Global Economy

Global Business

Basic Vietnamese

Advanced Vietnamese

Government Powers and Limitations

Introduction to Criminal Justice

Construction Contracting: Business and Legal Principles, Second Edition

Rights of the Accused
Communication Across Cultures

Microlearning

A Comprehensive Guide to Applying Universal Design for Learning
ChatGPT in Higher Education
Basic Electricity For Technology Programs
Basic Motor Control
Applied Industrial Electricity
Fundamentals of Electrical Engineering I
Elementary Differential Equations with Boundary Value Problems
Fundamentals of Compressible Fluid Mechanics
Introduction to Intellectual Property Law
E-Resource Licensing Explained
Legal Research Online
A Guide to Writing in Law School

Current & Emerging Computing Technology
Ethics in Law Enforcement
Digital Accessibility as a Business Practice
Environmental Science
Health and Safety in Canadian Workplaces
Cross Connection Control for Plumbing and Piping Trades
A Guide to Numeracy in Nursing

In the Community (An Intermediate Integrated Skills Textbook)
IDF Atlas 11th Edition 2025
Everything you always wanted to know about European Union health policies but were afraid to ask
IMPROVING HAND HYGIENE IN CRUISE SHIP: AN INTERVENTION STUDY
Embedded Controllers Using C and Arduino / 2E
Principles of Economics 3e
The Effect of Organizational Culture on the Quality of Accounting Information Systems: Evidence From Vietnam
World Cancer Report
BC Reads: Adult Literacy Fundamental English Course Pack 5
Intermediate Financial Accounting
Vietnam: High Quality Education for All by 2020

Thực trạng tích hợp giáo dục vì sự phát triển bền vững trong dạy học “Sinh thái học và môi trường” (Sinh học 12): Nghiên cứu tại một số trường trung học phổ thông ở Hà Nội và thành phố Hồ Chí Minh

Tổng quan các nghiên cứu về thành phần hóa học và hoạt tính sinh học của loài thổ hoắc hương Agastache rugosa (Fisch. & C.A.Mey.) Kuntze
Giáo dục bảo tồn và phát huy bản sắc văn hóa truyền thống của các dân tộc thiểu số tại chỗ ở tỉnh Đắk Lắk -Thực trạng và những vấn đề đặt ra

Một số giải pháp phát triển du lịch văn hóa trở thành ngành kinh tế quan trọng của kinh tế Việt Nam
Chính sách hỗ trợ doanh nghiệp đổi mới sáng tạo xanh ở Việt Nam hiện nay

Dự báo sự phát triển của các doanh nghiệp việt nam bằng cách sử dụng một số mô hình kinh tế lượng
Preparation, characterization, and propertise of some SiO2 nanocomposite of polythiophenes containing hydrazone group
Release of lovastatin drug from poly( lactic acid) biomaterial
Characterization of acrylic coatings containing poly(triethylammonium 3- thiopheneacetate) polyelectrolyte and nano-SiO2
Synthesis and application of biochar from agricultural by-products. Effect of pyrolysis temperature on the acid-base properties of biochar
Molecular Docking Approach to Identify Flavonoids as Potential Phosphodiesterase 5 Inhibitors for Erectile Dysfunction Treatment

Nâng cao năng lực cán bộ vùng dân tộc thiểu số trong bối cảnh hội nhập kinh tế quốc tế
Tự chủ các trường đại học công lập ở Nhật Bản và kinh nghiệm cho Việt Nam
Kết quả nghiên cứu thực nghiệm xác định một số thông số động lực học của cụm trống lăn thiết vị thi công mặt đường bê tông xi măng
Nghiên cứu xây dựng mô hình động lực học hệ cơ khí – thủy lực của cụm trống lăn thiết bị thi công mặt đường bê tông xi măng
Fundamentals of Business Law
Xây dựng điều khiển trượt cho thiết bị bù điều khiển dòng công suất UPFC

Các hợp chất dihydrobenzofuran neo-lignan từ loài thông đất và hoạt tính chống oxy hóa của chúng
Kiến thức và nhận thức của sinh viên Dược năm cuối tại trường Đại học Thành Đô về thuốc generic
Chuyển đổi số đối với tạp chí khoa học và công nghệ của Việt Nam – thực trạng, giải pháp
Phát triển nguồn nhân lực số đáp ứng yêu cầu phát triển kinh tế số trong quá trình chuyển đổi số quốc gia, ở Việt Nam

Đánh giá chất lượng cuộc sống 54 bệnh nhân sau phẫu thuật thay khớp háng nhân tạo, tại bệnh viện quân y 354
Tỉ lệ sinh viên ngành Việt Nam học có việc làm sau tốt nghiệp: Thực trạng và giải pháp
Một số vấn đề về phát triển kĩ năng nghề nghiệp cho sinh viên chuyên ngành Luật trường Đại học Thành Đô
Giải pháp xây dựng và giữ vững niềm tin cách mạng cho sinh viên trường Đại học Thành Đô
Xây dựng bộ chỉ số đánh giá về chất lượng dịch vụ dược của nhà thuốc tại quận Nam Từ Liêm, thành phố Hà Nội
Phân tích cơ chế tác động của một số chất kích thích và thuốc cai nghiện để vận dụng mô hình cai nghiện phối hợp trong thực tế
Cạnh tranh sức mạnh mềm Trung – Mỹ tại Việt Nam giai đoạn từ năm 2017 đến năm 2022: Thực trạng và hàm ý chính sách cho Việt Nam
Luận giải về sự cần thiết phát triển nguồn nhân lực du lịch Việt Nam hiện nay

Tính toán hệ thống truyền động điện cho xe tự chế
Mô hình trường đại học thông minh 4.0 – Xu thế phát triển của các trường đại học tư thục, trong bối cảnh hiện nay

Hợp tác Nhà trường – Doanh nghiệp trong nghiên cứu khoa học và đào tạo sinh viên ngành Dược học: Nghiên cứu trường hợp tại Trường Đại học Thành Đô
Quản lý sức chứa điểm đến, sức chịu tải du lịch để điểm đến du lịch phát triển bền vững

Nghiên cứu khoa học giáo dục Việt Nam trên cơ sở dữ liệu scopus trong 10 năm thực hiện Nghị quyết 29-NQ/TW: Xu hướng và hợp tác quốc tế
Du lịch vùng biên giới – Xu hướng du lịch của giới trẻ

Quản lý tri thức nhằm thúc đẩy tăng trưởng kinh tế Việt Nam

Phát triển sản phẩm du lịch đặc thù trở thành ngành kinh tế mũi nhọn
Mapping The Landscape Of Continuing Education Research In Asia: A Bibliometric Analysis Of Scopus-Indexed Publications From 1972 To 2023

Science mapping the knowledge base on microlearning: using Scopus database between 2002 and 2021

Real-time prediction of the week-ahead flood index using hybrid deep learning algorithms with synoptic climate mode indices
Spatiotemporal performance evaluation of high-resolution multiple satellite and reanalysis precipitation products over the semiarid region of India
Forecasting Multi-Step Soil Moisture with Three-Phase Hybrid Wavelet-Least Absolute Shrinkage Selection Operator-Long Short-Term Memory Network (moDWT-Lasso-LSTM) Model

“The Leaf Essential Oils of Syzygium oblatum and Syzygium abortivum: Chemical Composition, Antimicrobial Activity, and Molecular Docking Study

High security and privacy protection model for STI/HIV risk prediction

Deep Learning-Assisted Sensitive 3C-SiC Sensor for Long-Term Monitoring of Physical Respiration
A bibliometric review of research on English as a medium of instruction (EMI), 1974–2022
Science communication matters: An exploratory study of academic public engagement in Vietnam using Bayesian statistics
A Validated RP‑HPLC–DAD Method for Analyzing Flavonoids in Caatinga Brazilian Green Propolis from Mimosa tenuiflora Produced by Apis mellifera
Lao tzu’s philosophical thought and its application in Vietnam at present
Graphitic carbon nitride supported silver nanoparticles (AgNPs/g-C3N4): synthesis and photocatalytic behavior in the degradation of 2,4- dichlorophenoxyacetic acid
Study on the Synthesis and Photocatalytic Performance of Modified TiO2 Supported by G-C3N4 in the Degradation of 2,4-Dichlorophenoxyacetic Acid
Comprehensive Study on the Adsorption and Degradation of Dichlorodiphenyltrichloroethane on Bifunctional Adsorption – Photocatalysis Material TiO2/MCM-41 Using Quantum Chemical Methods
Theoretical Analysis of Superior Photodegradation of Methylene Blue by Cerium Oxide/Reduced Graphene Oxide vs. Graphene
Effect of silica nanocomposite modified with some polythiophene derivations on characteristics and properties of waterborne acrylic coatings

Electromagnetics (Vol 1)

Effect of silica nanocomposite modified with some polythiophene derivations on characteristics and properties of waterborne acrylic coatings
Glochidion Species: A Review on Phytochemistry and Pharmacology
Study on the nanocomposites of polyaniline and Zn doped Fe3O4 using for arsenic absorption in water
An understanding of “universal history” in francis fukuyama’s “the end of history and the last man”
Pyrolysis of wheat straw pellets in a pilot-scale reactor: Effect of temperature and residence time
Pyrolytic Pathway of Wheat Straw Pellet by the Thermogravimetric Analyzer

Poly(butylene adipate-co-terephthalate)/thermoplastic canna starch (Canna edulis ker.) (PBAT/TPS) blend film – A novel biodegradable material
Flavonoids from Mimosa tenuiflora Green Propolis Chemotaxonomy, Antioxidant, Anti-Inflammation, AntiBacteria, Mosquito Larvicidal Activity, and In Silico Approach

Copula-Probabilistic Flood Risk Analysis with an Hourly Flood Monitoring Index

Physicochemical characteristics and oil sorption behaviours of novel polymeric materials based on modifications of water hyacinth (Eichhornia crassipes) fibres

The Leaf Essential Oils of Neolitsea vuquangensis: A Rich Resource of β-(E)-Ocimene

Assessment of hemostatic ability of biomaterial based on chitosan and Eclipta prostrata L. extract
Graphitized carbon nanosheets doped with phosphorus heteroatoms and molybdenum phosphide nanoparticles: A novel cathodic catalyst for fuel cell applications

Camellia annamensis (Theaceae): phytochemical analysis, cytotoxic, antioxidative, and antimicrobial activities
Бнаружение уязвимостей и применение методов обеспечения Безопасности веб-сайта
Factors influencing pharmacy students’ satisfaction with pharmacy education quality: A cross-sectional study at a private university in Vietnam
Giới thiệu về Khởi nghiệp
Leading Innovation – 2nd edition

At the Forefront, Looking Ahead: Research-Based Answers to Contemporary Uncertainties of Management
Leadership in a Changing World A Multidimensional Perspective
BÁO CÁO TỔNG HỢP QUY HOẠCH MẠNG LƯỚI CƠ SỞ GIÁO DỤC ĐẠI HỌC VÀ SƯ PHẠM THỜI KỲ 2021-2030, TẦM NHÌN ĐẾN NĂM 2050

Toward a more competitive environment for transnational education in Viet Nam
Viet Nam: Towards a New International Education Hub in Southeast Asia – Lessons and Evidence
Giáo dục và Khoa học mở: Cẩm nang dành cho Giảng viên và Nhà nghiên cứu
Neuroscience – Canadian 1st Edition
Media, Society, Culture and You An Introductory Mass Communication Text
Turkey-Iran Relations after the JDP
Archaeological investigation of Itagunmodi potsherd pavement site, Ijesaland, Osun State, Nigeria
Trends in social behaviour among secondary school adolescents in Ibadan
Access to shelter by the poor through community participation
Student on-campus housing at bursting point
Yaa Baa
Welcome to Mitchell’s Plain
All about the Rites
Movements in Ethiopia, Ethiopia in Movement. Volume 1

Concise Manual for Ceramic Studies
Current Electoral Processes in Southeast Asia. Regional Learnings
Public policies and food systems in Latin America
Educating the Nation in Ethiopia

Japan-Vietnam
Interactions with a Violent Past
The End of Innocence?
Math in Society: Mathematics for liberal arts majors
Elementary Calculus
Measure, Integration & Real Analysis
Optimal, Integral, Likely Optimization, Integral Calculus, and Probability for Students of Commerce and the Social Sciences

PSYC 2200: Elementary Statistics for the Behavioral and Social Sciences
Informal Calculus with Applications to Biological and Environmental Sciences

Introduction to Statistical Thinking

Intermediate Statistics with R
Modeling, Functions, and Graphs
Euclid’s Elements Redux
Mostly Harmless Statistics
Trigonometry
Elementary Algebra

Intermediate Algebra

Evidence-based Software Engineering
Introduction to Applied Statistics for Psychology Students
Statistics for Research Students
Tea Time Linear Algebra Explorations in Mathematics – 2nd Edition

Basic Algebra with Applications – 5th Edition
Mathematics for Biomedical Physics
The Art of Polynomial Interpolation
Beyond Holy Russia: The Life and Times of Stephen Graham
Cultural Heritage Ethics Between Theory and Practice
Mr. Emerson’s Revolution
Metaethics from a First Person Standpoint An Introduction to Moral Philosophy
Knowledge and the Norm of Assertion An Essay in Philosophical Science
The Idea of Europe Enlightenment Perspectives

Education in Post-Coup Myanmar
Heroes and Revolution in Vietnam
Ethics for A-Level
Denis Diderot ‘Rameau’s Nephew’ – ‘Le Neveu de Rameau’ A Multi-Media Bilingual Edition 2nd Edition
L’idée de l’Europe au Siècle des Lumières
Die Europaidee im Zeitalter der Aufklärung

55 năm Khoa học Giáo dục Việt Nam

Advanced Algebra v. 1.0

Calculus in Context – 2008 Edition

Technical Writing and Simple Statistics : for laboratory classes
Who Teaches Writing

Supporting Technology Integration for School Leaders

Mathematics for Elementary Teachers
Teaching in a Digital Age: Guidelines for designing teaching and learning – 2nd Edition

Comprehensive Individualized Curriculum and Instructional Design: Curriculum and Instruction for Students with Developmental Disabilities/Autism Spectrum Disorders
Foundational Practices of Online Writing Instruction

Writing Programs Worldwide: Profiles of Academic Writing in Many Places

WAC and Second-Language Writers: Research Towards Linguistically and Culturally Inclusive Programs and Practices

Education for a Digital World: Advice, Guidelines and Effective Practice from Around Globe

Teaching Crowds: Learning and Social Media
Project Management for Instructional Designers
Mathematics for Elementary Teachers
Efficacious Technology Management: A Guide for School Leaders

Hybrid-Flexible Course Design
Introduction to Curriculum for Early Childhood Education

Sharing Our Knowledge: Best Practices for Supporting English Language Learners in Schools

Writing Instruction Tips For Automated Essay Graders: How To Design an Essay for a Non-human Reader
Elementary Earth and Space Science Methods
Exploring Physical Phenomena

Design for Learning: Principles, Processes, and Praxis
Foundations of Learning and Instructional Design Technology
Building Democracy for All: Interactive Explorations of Government and Civic Life

Foundations of Educational Technology

Learning in the Digital Age
Making and Being

Teaching Early and Elementary STEM

Mathematics Methods for Early Childhood
The Asynchronous Cookbook
Precalculus 2e

Introductory Statistics

Statistics High school
The Infrastructure Finance Challenge

Technology in Schools

Key Concepts of Computer Studies
Undocumented Migrants and Healthcare: Eight Stories from Switzerland

Using Open Educational Resources to Promote Social Justice

Learning, Marginalization, and Improving the Quality of Education in Low-income Countries
Intersections of Open Educational Resources and Information Literacy
IoT Use Cases and Technologies
Project Management
Life, Re-Scaled: The Biological Imagination in Twenty-First-Century Literature and Performance
Calculus Volume 3
Prealgebra 2e

Calculus Volume 2

Calculus Volume 1
Foundations for Moral Relativism Second Expanded Edition
Beyond Price Essays on Birth and Death
A Time Travel Dialogue
Basic Knowledge and Conditions on Knowledge

Wellbeing, Freedom and Social Justice The Capability Approach Re-Examined

Science as Social Existence Heidegger and the Sociology of Scientific Knowledge

Human and Machine Consciousness
Europa im Geisterkrieg. Studien zu Nietzsche
B C, Before Computers: On Information Technology from Writing to the Age of Digital Data
Forms of Life and Subjectivity: Rethinking Sartre’s Philosophy
Animals and Medicine: The Contribution of Animal Experiments to the Control of Disease
A Common Good Approach to Development: Collective Dynamics of Development Processes
Digital Transformation: Understanding Business Goals, Risks, Processes, and Decisions
Performing Deception – Learning, Skill and the Art of Conjuring
Engaging with Everyday Sounds
Music in Evolution and Evolution in Music
Chance Encounters – A Bioethics for a Damaged Planet
Tolerance – The Beacon of the Enlightenment
Agency Moral Identity and Free Will
Plato’s ‘Republic’ An Introduction
The Atheist’s Bible Diderot’s ‘Éléments de physiologie’
‘The Philosophes’ by Charles Palissot
Towards an Ethics of Autism A Philosophical Exploration
Giáo dục và Khoa học mở: Cẩm nang hướng dẫn dành cho Giảng viên và Nhà nghiên cứu
Adult Literacy Fundamental English – Course Pack 1
Kết quả nghiên cứu trong lĩnh vực Khoa học Xã hội và Nhân văn của các cơ sở Giáo Dục Đại Học Việt Nam giai đoạn 1965 – 2020: Phân tích từ dữ liệu Scopus

Mind Your Writing

Developing Writers in Higher Education: A Longitudinal Study

Developing and Assessing Academic and Professional Writing Skills

About Writing: A Guide
About Writing: A Guide
Writing Guide with Handbook

Write Here, Right Now: An Interactive Introduction to Academic Writing and Research
You, Writing! A Guide to College Composition

The Gordon State College Writing Handbook
Let’s get writing!

Mindful Technical Writing
Business Meets the Humanities: The Human Perspective in University-Industry Collaboration
On the Significance of Religion in Violence Against Women and Girls
Wealth and Power: Philosophical Perspectives
Superdiversity: Migration and Social Complexity

The Future of Self-Governing, Thriving Democracies: Democratic Innovations By, With and For the People
Sovereign Debt Sustainability: Multilateral Debt Treatment and the Credit Rating Impasse
Urban Politics of Human Rights
Climate Neutral and Resilient Farming Systems: Practical Solutions for Climate Mitigation and Adaptation
Injustice in Urban Sustainability: Ten Core Drivers
Capitalisms and Democracies: Can Growth and Equality be Reconciled?
Biosecurity, Economic Collapse, the State to Come: Political Power in the Pandemic and Beyond
Contestations of Citizenship, Education, and Democracy in an Era of Global Change: Children and Youth in Diverse International Contexts
Global Citizenship in Foreign Language Education: Concepts, Practices, Connections
Unsettled Urban Space: Routines, Temporalities and Contestations
Leadership for Disaster Resilience: Lessons from India

Global Political Leadership: In Search of Synergy
Diversity and Inclusion in Japan: Issues in Business and Higher Education
Invention Pedagogy – The Finnish Approach to Maker Education
Unlocking Private Investment in Sustainable Infrastructure in Asia
Resilience, Conflict-Related Sexual Violence and Transitional Justice: A Social-Ecological Framing
Digital Constitutionalism: The Role of Internet Bills of Rights

Decentralization, Local Governance, and Localizing the Sustainable Development Goals in Asia and the Pacific
Disputed Archival Heritage
What is Europe?
Risk Management Maturity: A Multidimensional Model
Discourses, Modes, Media and Meaning in an Era of Pandemic: A Multimodal Discourse Analysis Approach
Drones and Geographical Information Technologies in Agroecology and Organic Farming: Contributions to Technological Sovereignty
Assessment for Experiential Learning

Bias, Belief, and Conviction in an Age of Fake Facts
Tourism, Knowledge and Learning
Tourism and Heritage in the Chornobyl Exclusion Zone
State Fragility: Case Studies and Comparisons

RNA, the Epicenter of Genetic Information
Embracing the Future: Creative Industries for Environment and Advanced Society 5.0 in a Post-Pandemic Era

Universities, Stakeholders and Social Mission: Building Cooperation Through Action Research
Designing Smart and Resilient Cities for a Post-Pandemic World: Metropandemic Revolution

Meanings of Public and the Future of Public Services

Contemporary Research on Management and Business
5G: 2020 and Beyond
Advances in Intelligent Robotics and Collaborative Automation
An Introduction to Digital Signal Processing
Generation and Applications of Extra-Terrestrial Environments on Earth
Innovative Strategies in Tissue Engineering
Building Industries at Sea – ‘Blue Growth’ and the New Maritime Economy
Cooperative Radio Communications for Green Smart Environments
Paths to a Culture of Tolerance and Peace
Advancing IoT Platforms Interoperability
Network Based High Speed Product Development
Analytic Techniques for Public Management and Policy
Criminal Justice Statistics

Disease Prevention and Healthy Lifestyles
ECE Developmental Psychology
Ed Guide

Elements of Public Speaking
English Composition

English Composition I
English Composition II

Enhanced College Writing
Human Growth and Development
Introduction to College Research

Introduction to Creative Writing

Introduction to Ethics

Small Business Management

Problem Solving in Teams and Groups

Introduction to Philosophy

Introduction to Philosophy

Introduction to Spreadsheets
Observation and Assessment in Early Childhood Education

Personal Finance

Philosophy in the Humanities

Psychology of Work

Public Speaking
Research Methods for the Social Sciences
Social Justice Picture Books

World Religions
Beyond Good and Evil

Technical and Business Writing

Communication Training and Development

Technologies in Decline
Cone Penetration Testing 2022
Digital System Design – Use of Microcontroller
Tunnelling

Soil Erosion and Carbon Dynamics
Kinanthropometry IX
Critical Thinking
Copy(write): Intellectual Property in the Writing Classroom
Composition and Literature
Business Writing Style Guide
Beyond Argument: Essaying as a Practice of (Ex)Change
Podcasting as an Intimate Medium
Seven Democratic Virtues of Liberal Education: A Student-Inspired Agenda for Teaching Civic Virtue in European Universities

Identities and Intimacies on Social Media: Transnational Perspectives
The Regulation of Megabanks: Legal frameworks of the USA and EU

Africa–Europe Cooperation and Digital Transformation
Live, Die, Buy, Eat: A Cultural History of Animals and Meat
University Autonomy Decline: Causes, Responses, and Implications for Academic Freedom
The Impossibilities of the Circular Economy: Separating Aspirations from Reality
The Role of Business in Global Sustainability Transformations
Religion and World Politics: Connecting Theory with Practice
Asian Perceptions of Gulf Security
Pluricentric Languages and Language Education: Pedagogical Implications and Innovative Approaches to Language Teaching
Histories of Tax Evasion, Avoidance and Resistance
The Boundaries of Democracy: A Theory of Inclusion
Urbanizing the Regional Sector to Strengthen Economy and Business to Recover from Recession
Capitalism, Coronavirus and War: A Geopolitical Economy

Non-Ideal Foundations of Language

Law and Social Policy in the Global South: Brazil, China, India, South Africa
Sport Stadiums and Environmental Justice
Ecocinema Theory and Practice 2

Sweden’s Pandemic Experiment
Assessment for Inclusion in Higher Education: Promoting Equity and Social Justice in Assessment
Re-imagining the Teaching of European History: Promoting Civic Education and Historical Consciousness
Sustainable Future: Trends, Strategies and Development
Global Development in the Arctic: International Cooperation for the Future

How People Compare
The Carbon Chain in Carbon Dioxide Industrial Utilization Technologies
Management and Visualisation: Seeing Beyond the Strategic
Humanitarian Journalists: Covering Crises from a Boundary Zone
Human Resources Management in Multinational Companies: A Central European Perspective
Expertise, Policy-making and Democracy
Arguments in Context

Academic Writing I
1, 2, 3 Write!
Mental Health is a Verb: A Pocket Guide to Mental Health for Nursing Students
Nursing Assistant

Molecular Science for Drug Development and Biomedicine
Marine Compounds and Cancer
Dietary Intake and Behavior in Children
Diet and Metabolic Dysfunction (2)
Diagnosis and Treatment of Thoracic Outlet Syndrome
Diagnosis and Management of Pediatric Diseases
Development and Application of Herbal Medicine from Marine Origin
Cancer Biomarkers and Targets in Digestive Organs
Cadmium Sources and Toxicity
Beverage Consumption Habits around the World: Association with Total Water and Energy Intake
Cognitive Supervision for Robot-Assisted Minimally Invasive Laser Surgery
Nursing Pharmacology

Interface Oral Health Science 2016: Innovative Research on Biosis–Abiosis Intelligent Interface
Literature Reviews for Education and Nursing Graduate Students
Medical Terminology for Healthcare Professions
Brain and Human Body Modeling 2020
Biomechanics of Human Movement
An EKG Interpretation Primer
Frontiers in Cardiovascular Care

Wellness
Trauma-Informed Care in Behavioral Health Services
Biochemistry for Nurses
Building a Medical Terminology Foundation
Clinical Procedures for Safer Patient Care
Modern Philosophy
Literature, the Humanities, and Humanity
Introduction to Women, Gender, Sexuality Studies
Introduction to Philosophy – Philosophy of Religion
Introduction to Philosophy – Logic
Introduction to Philosophy – Ethics
Introduction to Philosophy – Epistemology
Introduction to Philosophy – Aesthetic Theory and Practice
Introduction to Logic and Critical Thinking
Greek and Latin Roots – Part II – Greek
Greek and Latin Roots – Part I – Latin
Essentials of Linguistics
A Concise Introduction to Logic
Research Methods in Psychology
Principles of Microeconomics – 2e
Principles of Microeconomics – 2021A Lyryx
Principles of Microeconomics
Principles of Macroeconomics
Intermediate Microeconomics with Microsoft Excel
Human Rights in Brief
Principles of Sociological Inquiry: Qualitative and Quantitative Methods
Balancing the self : Medicine, politics and the regulation of health in the twentieth century

Women and Reproductive Technologies: The Socio-Economic Development of Technologies Changing the World
Medicinal Effects of Agathosma (Buchu) Extracts
Comorbidity of Mental and Physical Disorders
Hippocrates Now : The ‘Father of Medicine’ in the Internet Age

Progress and pathology Medicine and culture in the nineteenth century
Socio-economics of Personalized Medicine in Asia

Contemporary Health Issues

Programming Fundamentals

Patterns for Beginning Programmers
Chemical Engineering Separations: A Handbook for Students
Genetic tests in sports medicine – many studies, little impact
p-BioSPRE – p-medicine Biospecimen Search and Project Request Engine
Principles of Sociological Inquiry: Qualitative and Quantitative Methods
Writing in College: From Competence to Excellence
Web Literacy for Student Fact-Checkers
The Word on College Reading and Writing
Media Studies 101
Communication for Business Professionals
Building Blocks of Academic Writing
Advanced English

Entrepreneurship
Principles of Finance
Concepts of Biology
Introduction to Business
Controversies around educational projects for gender equality in Italy
Search for knowledge and recognition
“Guests and Aliens”: Re-configuring new mobilities in the easten Mediterranean after 2011 – with a special focus on Syrian refugees

Proceedings of the Paris open science European conference
Good Health and Well-Being
Active Learning Kit
Society and Business Anthology
Culture and Psychology
Psychology 2e
Small Group Communication Case Study

Cultural Anthropology

Cultivating Your Leadership Capabilities

Criminology

Communication Studies

Child and Adolescent Psychology
Finger-Tip Facts for School Psychologists
Hearts and Minds
Urban Literacy: Learning to Read the City Around You
Tokyo University and the War
Some Problems of Philosophy

Marriage, Intimate Relationships and Families
Introduction to Social Work: A Look Across the Profession
Introduction to Philosophy: Philosophy of Mind
Foundations for Assisting in Home Care
Electronic Commerce: The Strategic Perspective
Big Data for Epidemiology: Applied Data Analysis Using National Health Surveys
Applied Ethics Primer

A Practicum in Behavioral Economics

A history of enterprise search 1938-2022
Nursing Care at the End of Life: What Every Clinician Should Know
The Mosaic theory of natural complexity
Between imagined communities of practice
India-China: intersecting universalities

Adat and indigeneity in Indonesia
Heritage regimes and the state
Contemporary art collectors: the unsung influences on the art scenes
Employment in the culture sector in 2005
World heritage Angkor and beyond
From an ancient road to a cultural route
Introduction to Entrepreneurship
Violence in Nigeria: A qualitative and quantitative analysis
Guidelines for Improving the Effectiveness of Boards of Directors of Nonprofit Organizations
Good Corporation, Bad Corporation: Corporate Social Responsibility in the Global Economy
Steps to Success: Crossing the Bridge Between Literacy Research and Practice
Teaching Autoethnography: Personal Writing in the Classroom
Microbiology: A Laboratory Experience
Historians of Asia on political violence

Sciences with the science
Foundations for moral relativism
Designing sustainable urban futures
Negotiating tradition
Sustainable development

The economic contribution of culture
What works in conservation 2017
Introductory Business Statistics

Business Law I Essentials
Together: The Science of Social Psychology
Introduction to LGBTQ+ Studies: A Cross-Disciplinary Approach
Project Management
Organizational Behavior

Media Innovation and Entrepreneurship
Introducing Marketing
Intermediate Financial Accounting – Volume 2
Intermediate Financial Accounting – Volume 1
Introduction to Financial Accounting
Information Systems for Business and Beyond
Human Resource Management
Good Corporation, Bad Corporation
Fundamentals of Business
Financial Strategy for Public Managers
Financial Mathematics
Entrepreneurship and Innovation Toolkit
eMarketing: The Essential Guide to Online Marketing
Electronic Commerce
Business Writing for Everyone
Business Math: A Step-by-Step Handbook
Beginning Excel 2019
University 101
Strategies for Academic Success
Blueprint for Success in College and Career
Public Health in Pharmacy Practice: A Casebook 2nd Edition
An Introduction to Labor and Employment Law
Learning to Learn Online

Human Nutrition: 2020 Edition
Introduction to tourism
Writing in College: From Competence to Excellence
Introduction to business
Communication Beginnings An Introductory Listening and Speaking Text for English Language Learners
